Sensing Life in Stillness: Unified Dynamic and Static Human Mesh Reconstruction with mmWave Radar
IMWUT, 2026
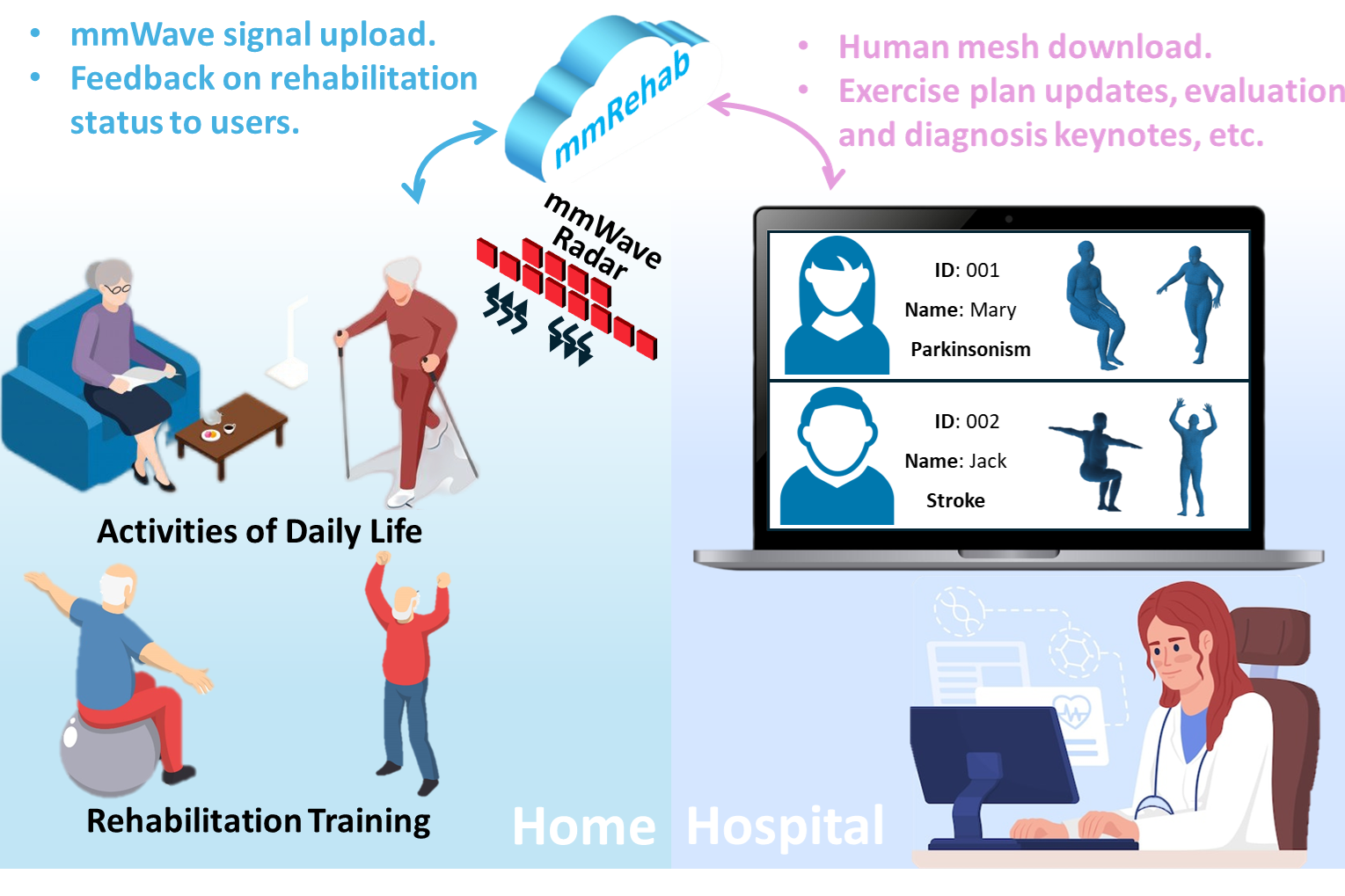
A visual tour of how mmRehab reconstructs dynamic and static human meshes from COTS mmWave radar by treating the tiny motions inside stillness as useful physiological signal.
Workflow
A unified pipeline for motion and stillness
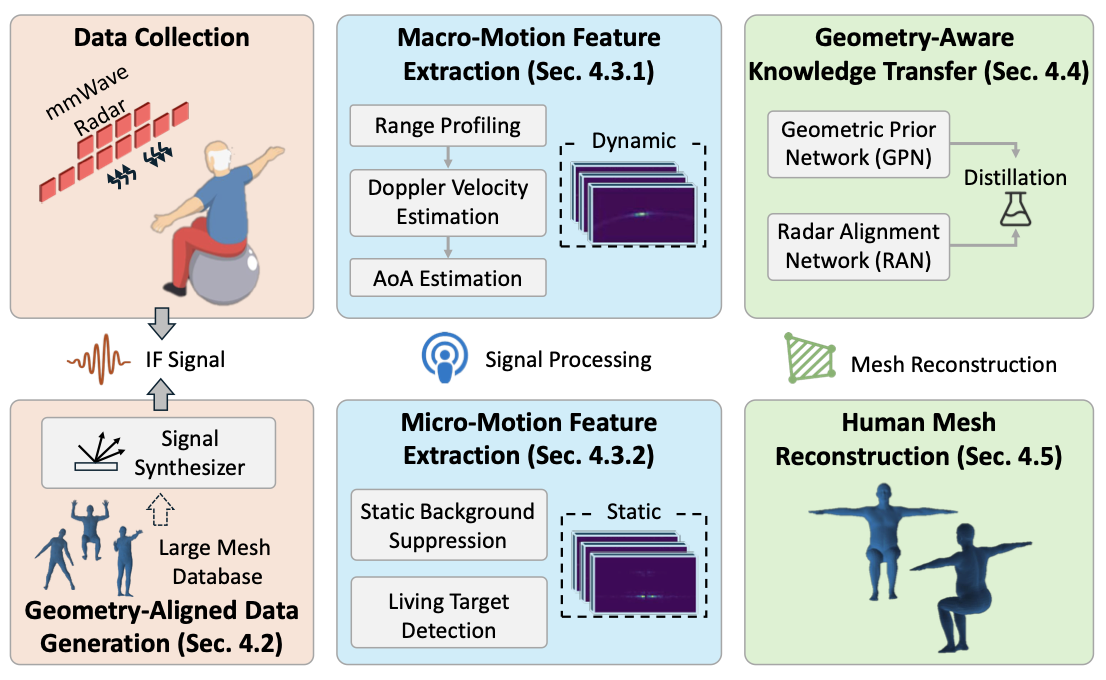
The current paper frames mmRehab as three connected parts: signal processing for macro- and micro-motion features, geometry-aligned data generation, and human mesh reconstruction through cross-modal knowledge transfer.
Data Synthesis
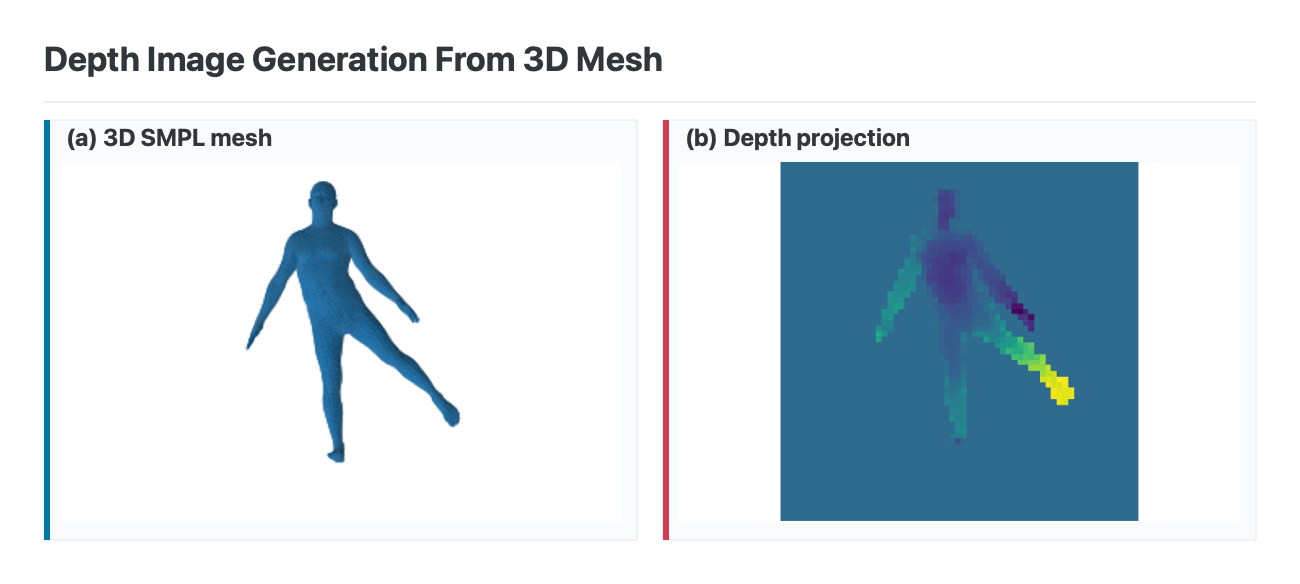
Depth projection bridges mesh geometry and radar learning
The method uses depth images rendered from 3D SMPL meshes as an intermediate geometric representation, giving the teacher network dense body-structure cues before distilling them into the radar model.
Macro-Motion Feature Extraction
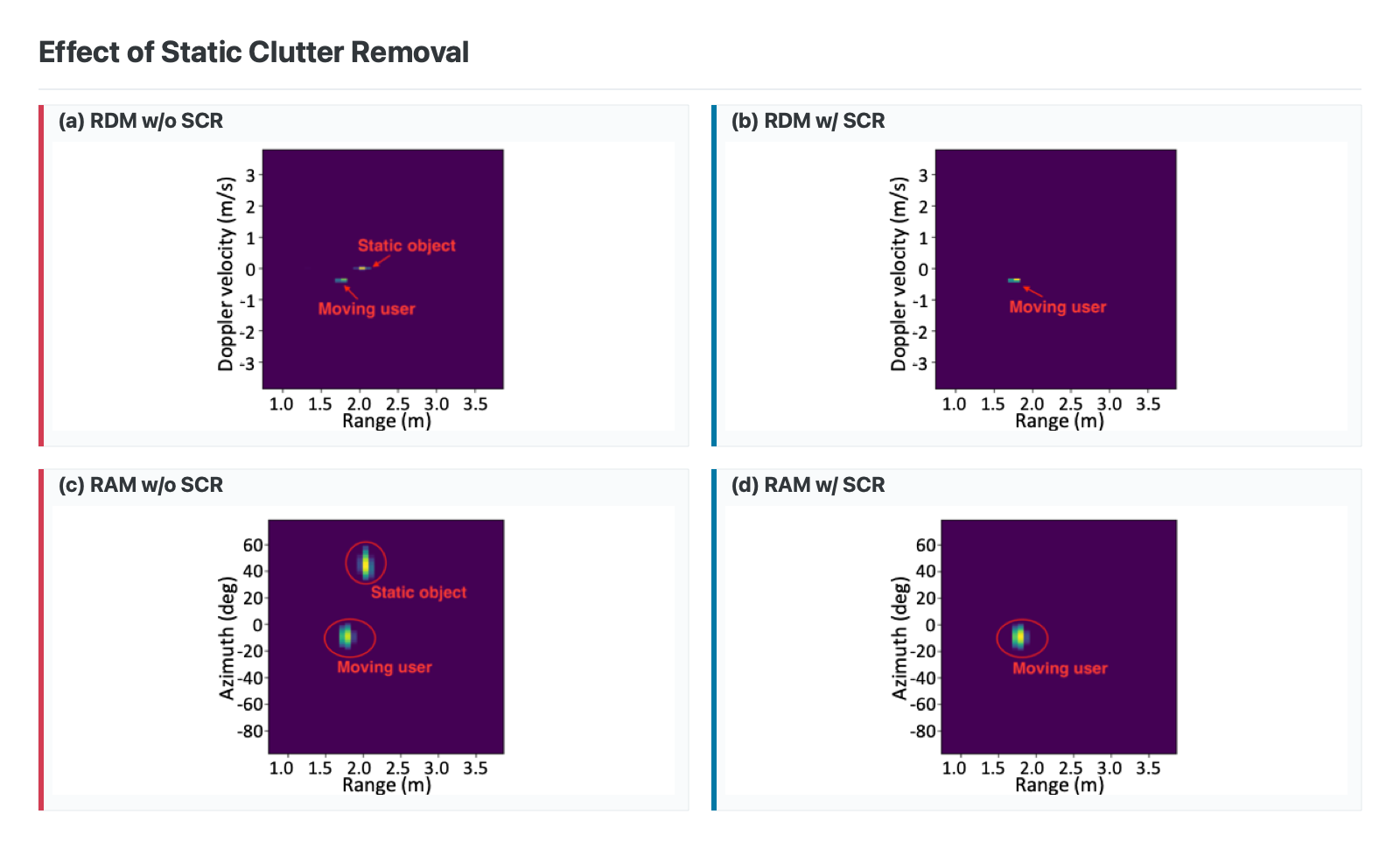
Static clutter removal clarifies dynamic targets
For moving users, SCR suppresses strong zero-Doppler reflections from static objects, making the dynamic range-Doppler and range-azimuth responses cleaner for downstream macro-motion analysis.
Micro-Motion Feature Extraction
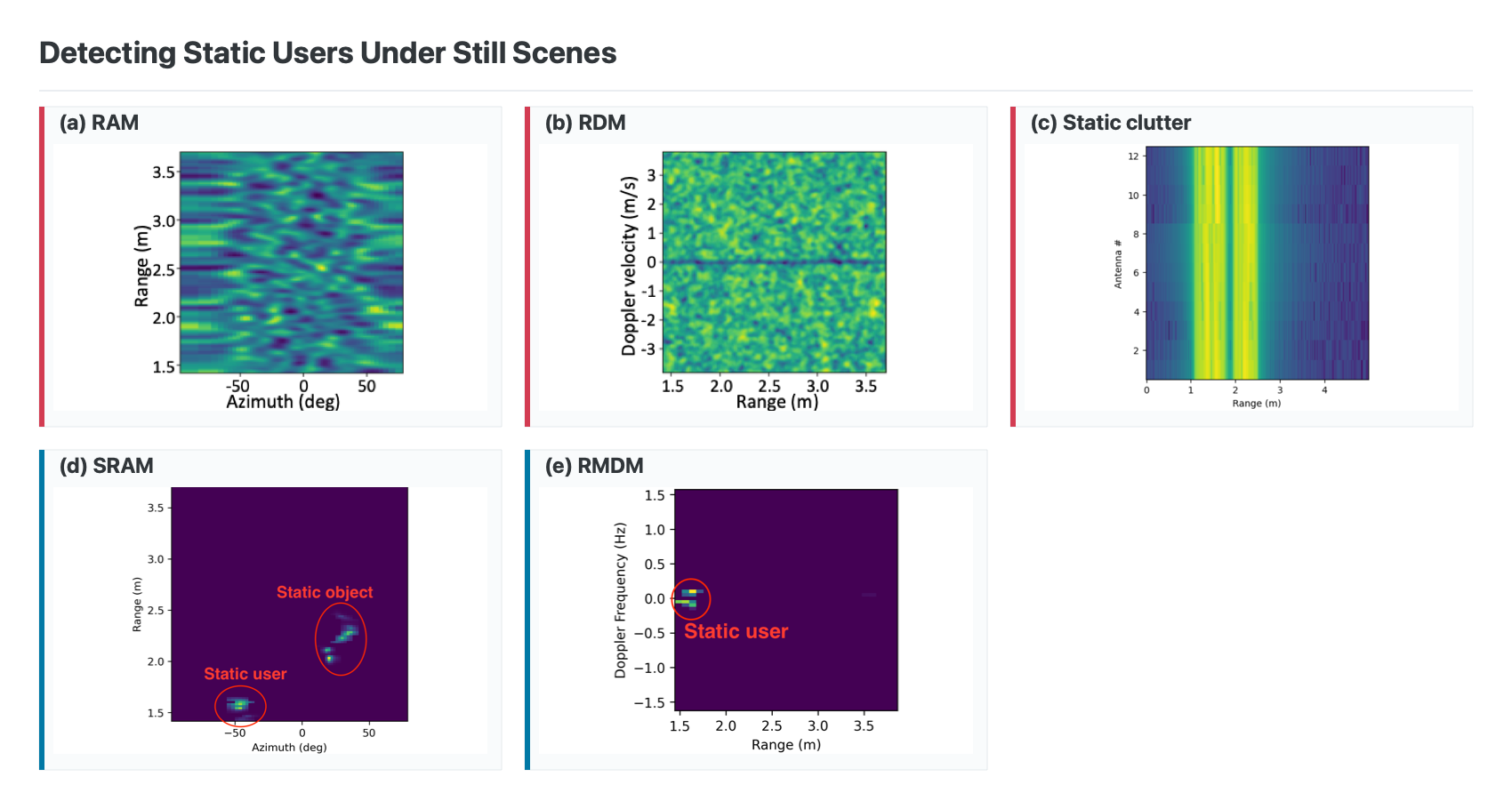
Static user detection is a multi-stage visual story
In still scenes, raw RAM/RDM and static clutter alone cannot identify the human target. Beamforming separates static targets into SRAM, while range-micro-Doppler exposes the subtle living signal that localizes the static user.
Model
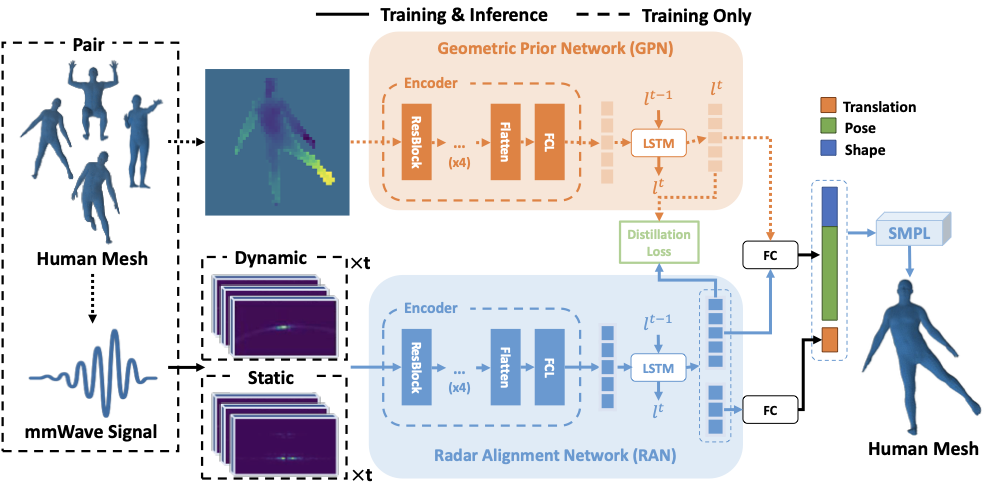
GPN supervises RAN through geometry-aware distillation
The Geometric Prior Network learns from depth-derived structure during training, while the Radar Alignment Network performs radar-only inference for dynamic and static mesh reconstruction.
Dataset
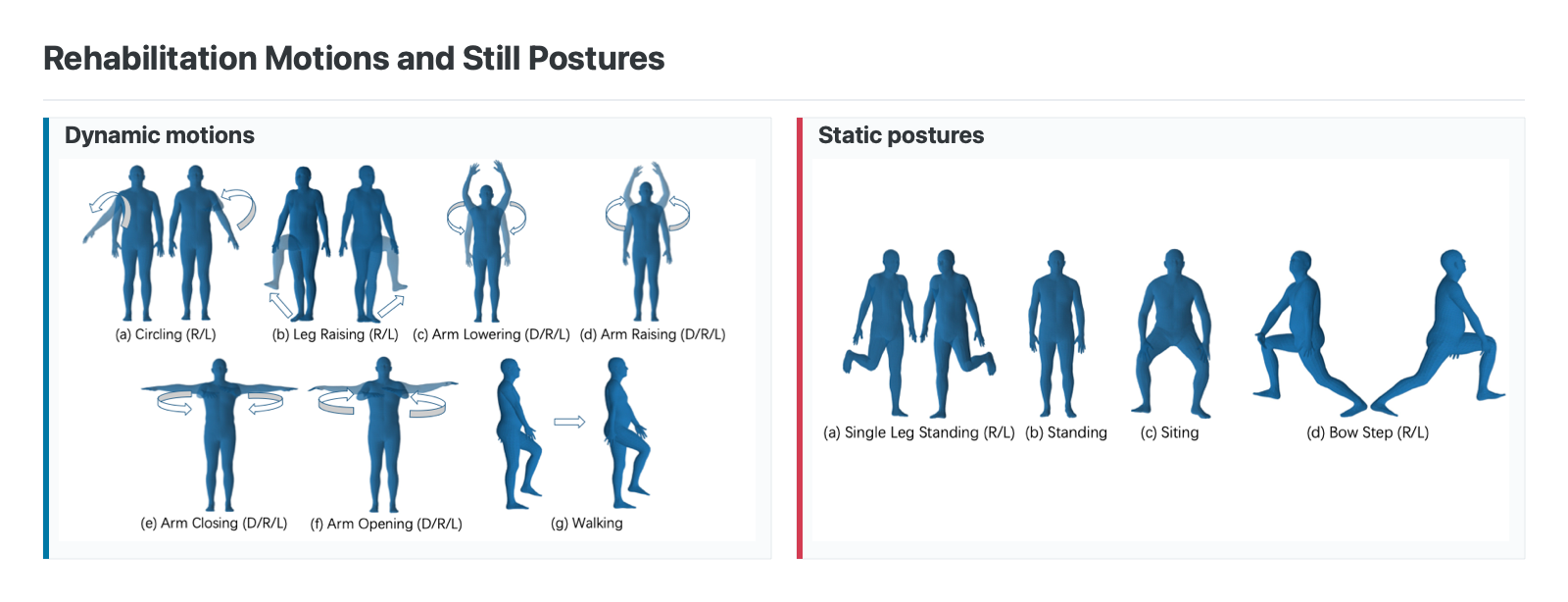
The evaluation covers both motions and held postures
The dataset includes dynamic rehabilitation actions such as arm/leg movement and walking, plus static postures such as standing, sitting, bow step, and single-leg support.
Evaluation
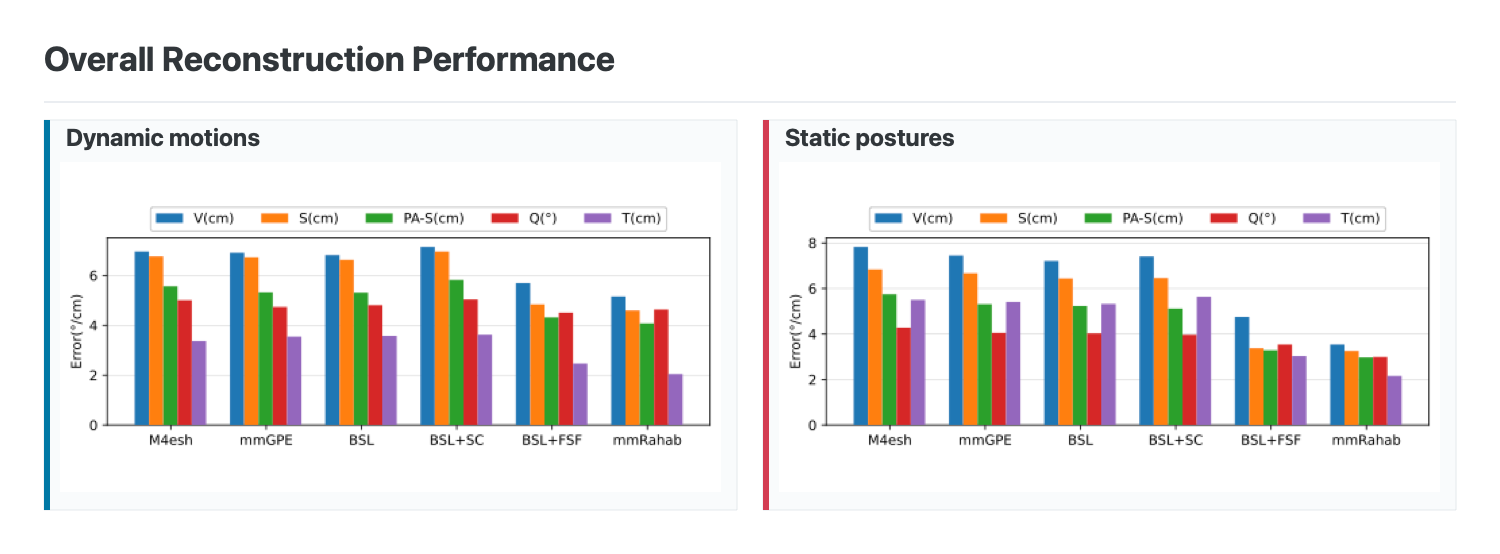
Overall results are paired across dynamic and static cases
The page now mirrors the paper's comparison: dynamic and static reconstruction metrics are shown together so readers can see that the same system improves both motion tracking and still-posture reconstruction.
Generalization
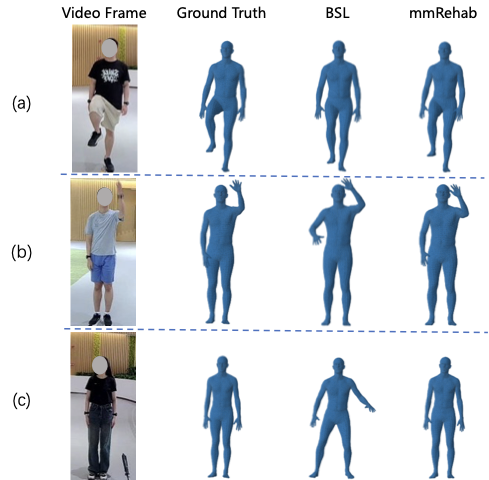
Meshes remain plausible for unseen users
Qualitative examples compare video frames, ground truth meshes, baseline estimates, and mmRehab outputs, showing better limb orientation and body geometry across users excluded from training.
Generalization
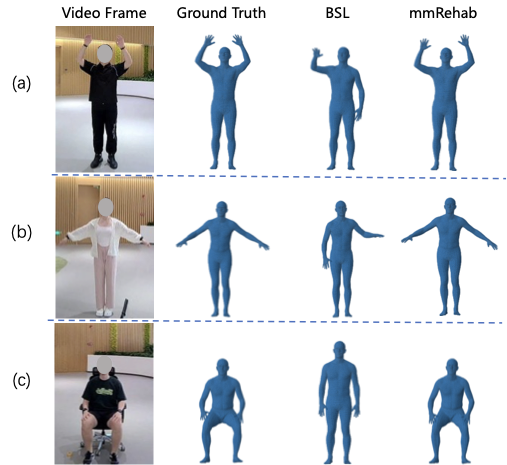
Unseen posture examples expose the static-pose gain
The qualitative unseen-posture figure shows where the baseline struggles with arm motion and sitting posture, while mmRehab preserves more realistic articulation and static body configuration.
Cross-User
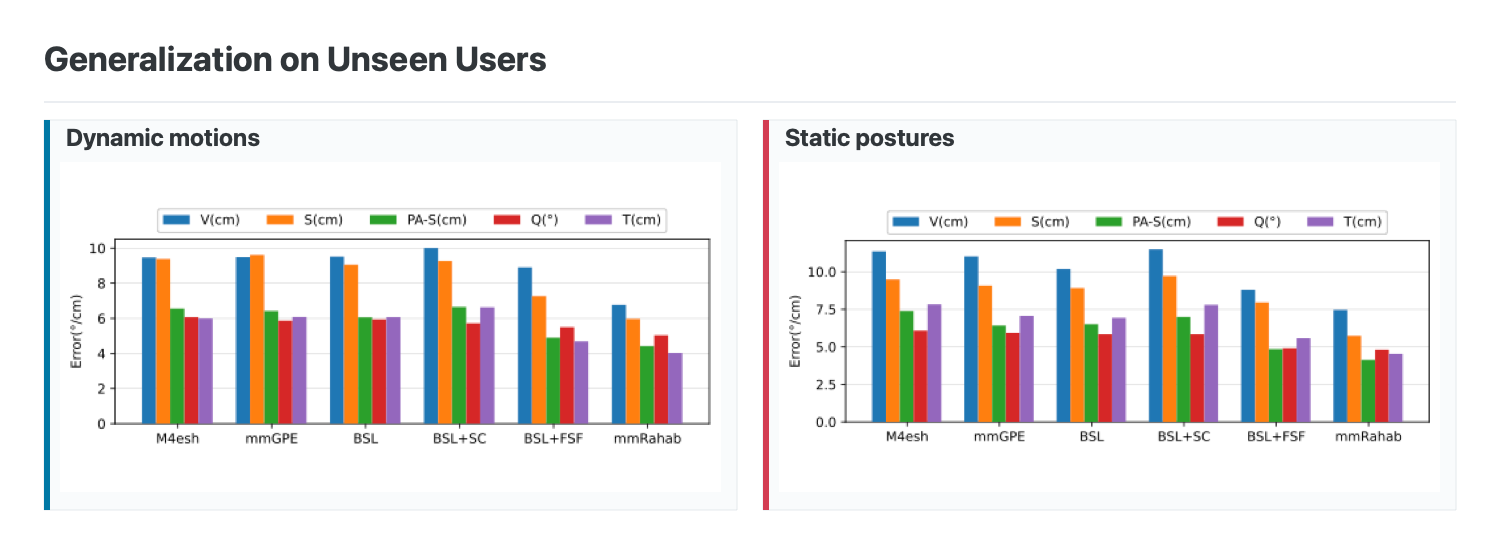
Unseen-user metrics are shown as a pair
Dynamic and static results are grouped together to match the paper's generalization analysis.
Unseen Postures
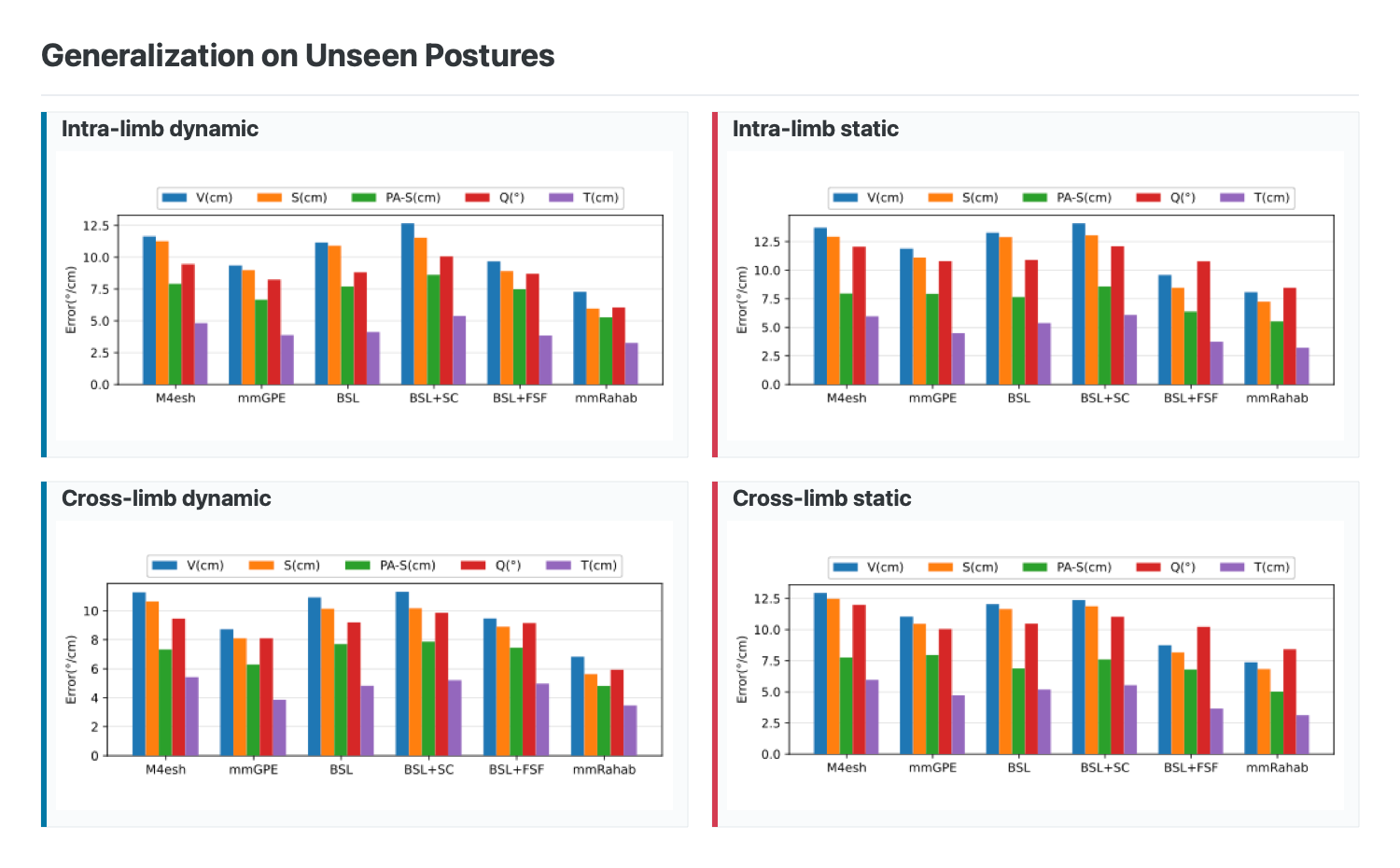
Unseen-posture testing covers two transfer settings
The intra-limb and cross-limb settings summarize how well mmRehab generalizes beyond motions and postures observed during training.
Deployment
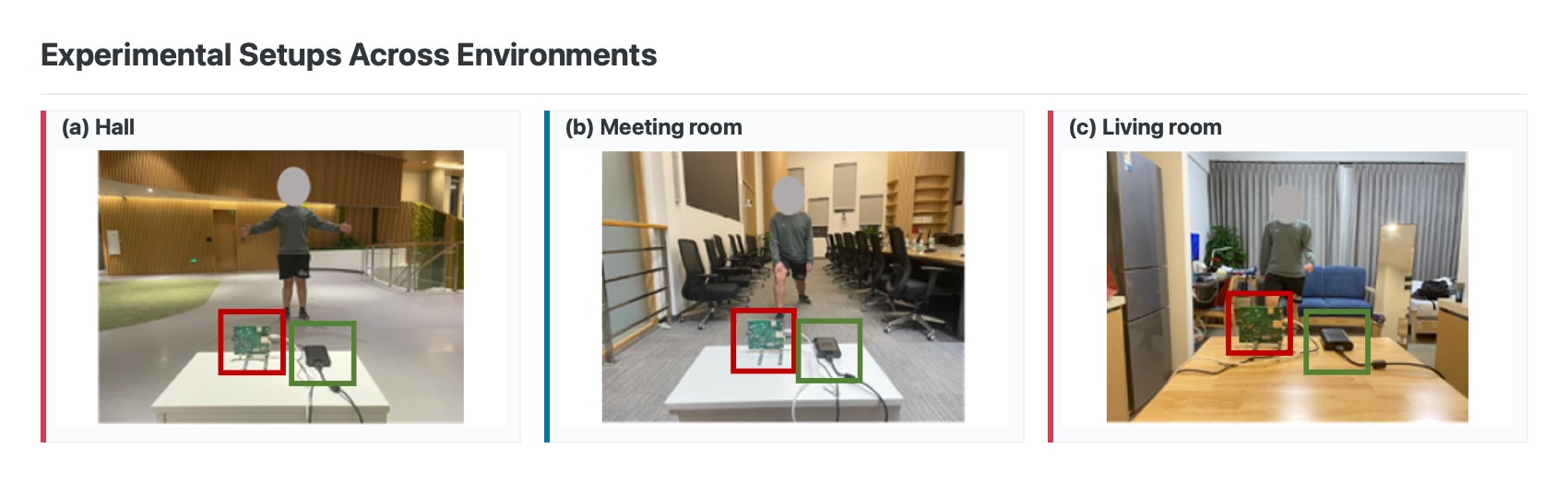
Evaluation spans practical indoor environments
The actual environment figure uses hall, meeting-room, and living-room setups, each with different clutter, furniture layout, and multipath conditions.
Robustness
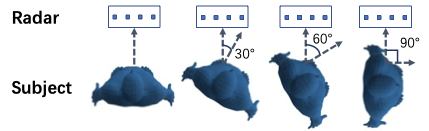
Orientation robustness is explicitly tested
The robustness section evaluates non-frontal sensing at 30, 60, and 90 degrees, showing where side-facing reflections begin to degrade mesh estimation.
Why static postures matter
Balance, endurance, and postural control are often expressed while the patient is holding still, so monitoring only large motion misses clinically meaningful recovery signals.
Why radar is attractive
mmWave sensing is contactless, privacy-preserving, and independent of lighting, making it a useful complement to camera- and wearable-based rehabilitation systems.
Where the limits appear
The paper reports strongest performance at shorter ranges and frontal or moderate orientations, with degradation at longer distances and larger side-facing angles.
Citation
1 | @article{chen2026sensing, |